John Larkin
2024-04-21 22:01:16 UTC
If one had, say, a 48 volt power bus, you could hang a half-bridge
switcher to ground, and a lowpass filter out. If the drive has duty
cycle n, the output voltage is 48*n. So we have a programmable power
supply with no feedback, which will be stable into any load.
The load regulation will be mediocre, but we could almost sell it
as-is.
So now, sense the output voltage and compute the error against the
target, run through a slowish integrator, and tweak the PWM to get
zero output voltage error. Gross transient response is basically the
response of the output filter, with some modest drool from the
integrator.
We can constrain the influence range of the integrator, just enough to
give the regulation that we need. That limits output swing in case the
feedback is wrong, as one could get from a botched remote sense
connection.
Loading Image...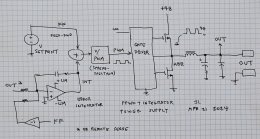
switcher to ground, and a lowpass filter out. If the drive has duty
cycle n, the output voltage is 48*n. So we have a programmable power
supply with no feedback, which will be stable into any load.
The load regulation will be mediocre, but we could almost sell it
as-is.
So now, sense the output voltage and compute the error against the
target, run through a slowish integrator, and tweak the PWM to get
zero output voltage error. Gross transient response is basically the
response of the output filter, with some modest drool from the
integrator.
We can constrain the influence range of the integrator, just enough to
give the regulation that we need. That limits output swing in case the
feedback is wrong, as one could get from a botched remote sense
connection.
Loading Image...
